git clone git@github.com:sekilab/RoadDamageDetector.git wget https://s3-ap-northeast-1.amazonaws.com/mycityreport/RoadDamageDataset.tar.gz wget https://s3-ap-northeast-1.amazonaws.com/mycityreport/trainedModels.tar.gz
tar -zxf ./RoadDamageDataset.tar.gz tar -zxf ./trainedModels.tar.gz cd RoadDamageDataset #删除掉 "Adachi", "Chiba", "Ichihara", "Muroran", "Nagakute", "Numazu", "Sumida" 子文件夹 /Annotations/ 中 ._ 开头的文件。否则执行会报错。
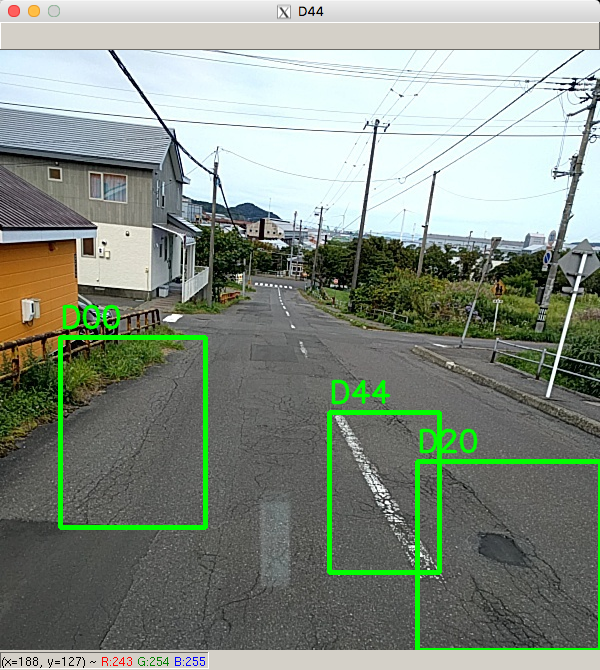
改写了用cv.imshow 展示的 py代码。
from xml.etree import ElementTree
from xml.dom import minidom
import collections
import os
import matplotlib.pyplot as plt
import matplotlib as matplot
import seaborn as sns
#%matplotlib inline
base_path = os.getcwd() + '/RoadDamageDataset/'
print(base_path)
damageTypes=["D00", "D01", "D10", "D11", "D20", "D40", "D43", "D44"]
# govs corresponds to municipality name.
govs = ["Adachi", "Chiba", "Ichihara", "Muroran", "Nagakute", "Numazu", "Sumida"]
# the number of total images and total labels.
cls_names = []
total_images = 0
for gov in govs:
file_list = os.listdir(base_path + gov + '/Annotations/')
for file in file_list:
total_images = total_images + 1
if file =='.DS_Store':
pass
else:
infile_xml = open(base_path + gov + '/Annotations/' +file)
#print(infile_xml)
tree = ElementTree.parse(infile_xml)
root = tree.getroot()
for obj in root.iter('object'):
cls_name = obj.find('name').text
cls_names.append(cls_name)
print("total")
print("# of images:" + str(total_images))
print("# of labels:" + str(len(cls_names)))
# the number of each class labels.
import collections
count_dict = collections.Counter(cls_names)
cls_count = []
for damageType in damageTypes:
print(str(damageType) + ' : ' + str(count_dict[damageType]))
cls_count.append(count_dict[damageType])
sns.set_palette("winter", 8)
sns.barplot(damageTypes, cls_count)
# the number of each class labels for each municipality
for gov in govs:
cls_names = []
total_images = 0
file_list = os.listdir(base_path + gov + '/Annotations/')
for file in file_list:
total_images = total_images + 1
if file =='.DS_Store':
pass
else:
infile_xml = open(base_path + gov + '/Annotations/' +file)
tree = ElementTree.parse(infile_xml)
root = tree.getroot()
for obj in root.iter('object'):
cls_name = obj.find('name').text
cls_names.append(cls_name)
print(gov)
print("# of images:" + str(total_images))
print("# of labels:" + str(len(cls_names)))
count_dict = collections.Counter(cls_names)
cls_count = []
for damageType in damageTypes:
print(str(damageType) + ' : ' + str(count_dict[damageType]))
cls_count.append(count_dict[damageType])
print('**************************************************')
import cv2
import random
def draw_images(image_file):
gov = image_file.split('_')[0]
img = cv2.imread(base_path + gov + '/JPEGImages/' + image_file.split('.')[0] + '.jpg')
print(base_path + gov + '/JPEGImages/' + image_file.split('.')[0] + '.jpg')
infile_xml = open(base_path + gov + '/Annotations/' +image_file)
tree = ElementTree.parse(infile_xml)
root = tree.getroot()
for obj in root.iter('object'):
cls_name = obj.find('name').text
xmlbox = obj.find('bndbox')
xmin = int(xmlbox.find('xmin').text)
xmax = int(xmlbox.find('xmax').text)
ymin = int(xmlbox.find('ymin').text)
ymax = int(xmlbox.find('ymax').text)
font = cv2.FONT_HERSHEY_SIMPLEX
# put text
cv2.putText(img,cls_name,(xmin,ymin-10),font,1,(0,255,0),2,cv2.LINE_AA)
# draw bounding box
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), (0,255,0),3)
return img
for damageType in damageTypes:
tmp = []
for gov in govs:
file = open(base_path + gov + '/ImageSets/Main/%s_trainval.txt' %damageType, 'r')
for line in file:
line = line.rstrip('\n').split('/')[-1]
#print(line)
if line.split(' ')[2] == '1':
tmp.append(line.split(' ')[0]+'.xml')
#print(tmp)
random.shuffle(tmp)
fig = plt.figure(figsize=(6,6))
for number, image in enumerate(tmp[0:1]):
#if(number > 0):
print('number & image :' + str(number) + image)
print('The image including ' + damageType)
img = draw_images(image)
cv2.imshow(damageType,img)
while(1):
if cv2.waitKey(1) & 0xFF == ord('q'):
break
#plt.subplot(1,1,number)
#plt.axis('off')
#plt.title('The image including ' + damageType)
#plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))